Không phải bất kì động cơ nào cũng có thể dùng làm động cơ servo. Động cơ servo là động cơ hoạt động dựa theo các lệnh điều khiển vị trí và tốc độ. Chính vì thế nó phải được thiết kế sao cho các đáp ứng là phù hợp với nhu cầu điều khiển. Về cơ bản thì một servo motor và một động cơ bình thường giống nhau về mặc cấu tạo và nguyên lý hoạt động (nghĩa là cũng có phần cảm phần ứng, khe hở từ thông, cách đấu dây … v.v...). Tuy nhiên tuỳ theo nhu cầu điều khiển mà nó có một số điểm cải tiến hơn (dành cho những mục đích đặc biệt) so với động cơ thường. Để hiểu được vấn đề này, xin trình bày các động cơ servo phục vụ cho các mục đích điều khiển cụ thể và những điểm cải tiến của nó. Sau đây là một vài ví dụ:
1. Tăng tốc độ đáp ứng tốc độ:
Các động cơ bình thường, muốn chuyển từ tốc độ này sang tốc độ khác thì cần có một khoản thời gian quá độ. Trong một số nhu cầu điều khiển, đòi hỏi động cơ phải tăng/giảm tốc nhanh chóng để đạt được một tốc độ mong muốn trong thời gian ngắn nhất, hoặt đạt được một vị trí mong muốn nhanh nhất. Ví dụ bạn muốn điều khiển một cơ cấu từ vị trí X đến vị trí X’, ban đầu khi ở xa vị trí X’ thì động cơ quay với vận tốc lớn để tăng tốc, tuy nhiên khi đến gần X’ đòi hỏi động cơ cần giảm tốc tức thì để có thể đạt được vị trí mong muốn một cách chính xác và loại trừ sự vọt lố vị trí. Các động cơ thường không thể đáp ứng được điều này. Để động cơ đáp ứng được những yêu cầu trên thì nó phải được thiết kế sao cho rút ngắn đáp ứng tốc độ của động cơ.
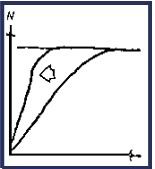
Muốn như vậy ta cần giảm moment quán tính và tăng dòng giới hạn cho động cơ. Để giảm moment quán tính thì động cơ servo được giảm đường kính rotor và loại bỏ các cơ cấu sắt không cần thiết. Để tăng dòng giới hạn, động cơ servo có thể sử dụng sắt Ferrit để làm mạch từ và thiết kế hình dạng lõi sắt cho phù hợp. Đối với động cơ nam châm vĩnh cữu thì nó cần được thiết kế sao cho ngăn cản được sự khử từ (hình dạng mạch từ) và tăng khả năng từ tính của nam châm (sử dụng nam châm đất hiếm rare earth magnet.
2. Tăng khả năng đáp ứng:
Đáp ứng ở đây cần được hiểu đó là sự tăng/giảm tốc cần phải "mềm” nghĩa là gia tốc là một hằng số hay gần như là một hằng số.
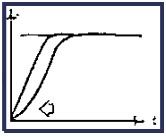
Một số động cơ như thang máy hay trong một số băng chuyền đòi hỏi đáp ứng tốc độ của cơ cấu phải "mềm”, tức là quá trình quá độ vận tốc phải xảy ra một cách tuyến tính. Để làm được điều này thì cuộn dây trong động cơ phải có điện cảm nhỏ nhằm loại bỏ khả năng chống lại sự biến đổi dòng điện do mạch điều khiển yêu cầu. Các động cơ servo thuộc loại này thường được thiết kế giảm thiểu số cuộn dây trong mạch và có khả năng thu hẹp các vòng từ trong mạch từ khe hở không khí.
3. Mở rộng vùng điều khiển (control range):
Một số yêu cầu trong điều khiển cần điều khiển động cơ ở một dải tốc độ lớn hơn định mức rất nhiều. Động cơ bình thường chỉ cho phép điện áp đặt lên nó phải bằng điện áp chịu đựng của động cơ và thông thường không quá lớn so với điện áp định mức.
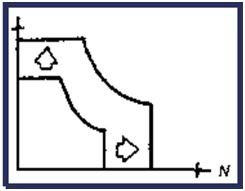
Động cơ servo thuộc loại này có thiết kế đặt biệt nhằm gia tăng điện áp chịu đựng hoặc tăng khả năng bão hoà mạch từ trong động cơ (nghĩa là động cơ làm việc ở đoạn phía dưới cách xa đoạn cùi chỏ (knee point)). Như vậy động cơ servo thuộc loại này phải được tăng cường cách điện và sử dụng sắt Ferrit hoặc nam châm đất hiếm (rare earth).
4. Khả năng ổn định tốc độ:
Động cơ servo loại này thường được thiết kế sao cho vận tốc quay của nó rất ổn định.
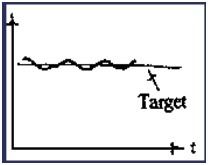
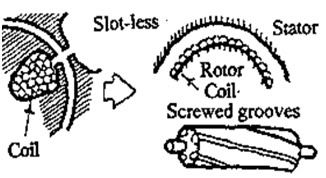
Như các bạn biết là không có mạch điện hoàn hảo, không có từ trường hoàn hảo trong thực tế. Chính vì thế một động cơ quay 1750 rpm không có nghĩa là nó luôn luôn quay ở 1750 rmp mà nó chỉ dao động quanh giá trị này. Động cơ servo khác biệt với động cơ thường là ở chỗ độ ổn định tốc độ khác cao. Các động cơ servo loại này thường được sử dụng trong các ứng dụng đòi hỏi tốc độ chính xác (như robot). Nó được thiết kế sao cho có thể gia tăng được dòng từ trong mạch từ lên khá cao và gia tăng từ tính của cực từ. Các rãnh rotor được thiết kế với hình dáng đặc biệt và các cuộn dây rotor cũng được bố trí khác đặc biệt để có thể đáp ứng được yêu cầu này. Một hình ảnh minh hoạ :
5. Tăng khả năng chịu đựng của động cơ:
Một số động cơ servo được thiết kế sao cho có thể chịu đựng được các tín hiệu điều khiển ở tần số rất và có khả năng chịu được được những yêu cầu tăng tốc bất ngờ từ bộ điều khiển (có thể tạo ra các xung điện hài bậc cao). Những động cơ như thế này thường được cải tiến về phần cơ để có tuổi thọ cao và có thể chống lại được sự hao mòn do ma sát trên ổ bi bạc đạn cũng như trên chổi than (đôi với DC)
Một động cơ servo có thể mang một số đặc điểm trên để phù hợp với nhu cầu điều khiển của người điều khiển
(Sưu tầm : webdien.com)